Author: Marius Hoggenmueller
All topics
-

Affective Autonomous Vehicle-Pedestrian Interaction
This project aims to enhance the perceived sociability, perceived safety, and user experience of autonomous…
-
Improving Human-Robot Co-Navigation Through Pedestrian Prediction Visualisations
An augmented reality concept to enhance the understandability of robot operation.
-

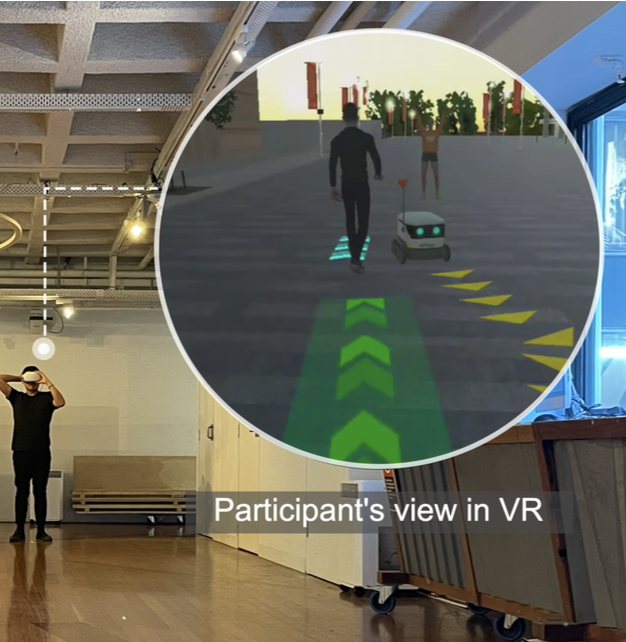
Evaluating Interactions With Autonomous Vehicles in VR
This project investigates which simulation platforms and prototyping representations to use for evaluating interactions between…
-

Collaborative Design Exploration of AV-Pedestrian Interfaces
We developed a tangible multi-display toolkit to support collaborative design explorations of AV-pedestrian interfaces.
-

Virtual Experience Prototyping
Building on the notion of experience prototyping, we investigated how early concept explorations can be…
-

Urban Robots for Placemaking
Woodie is a free-moving, chalk-drawing urban robot using the public space as a large canvas.…
-
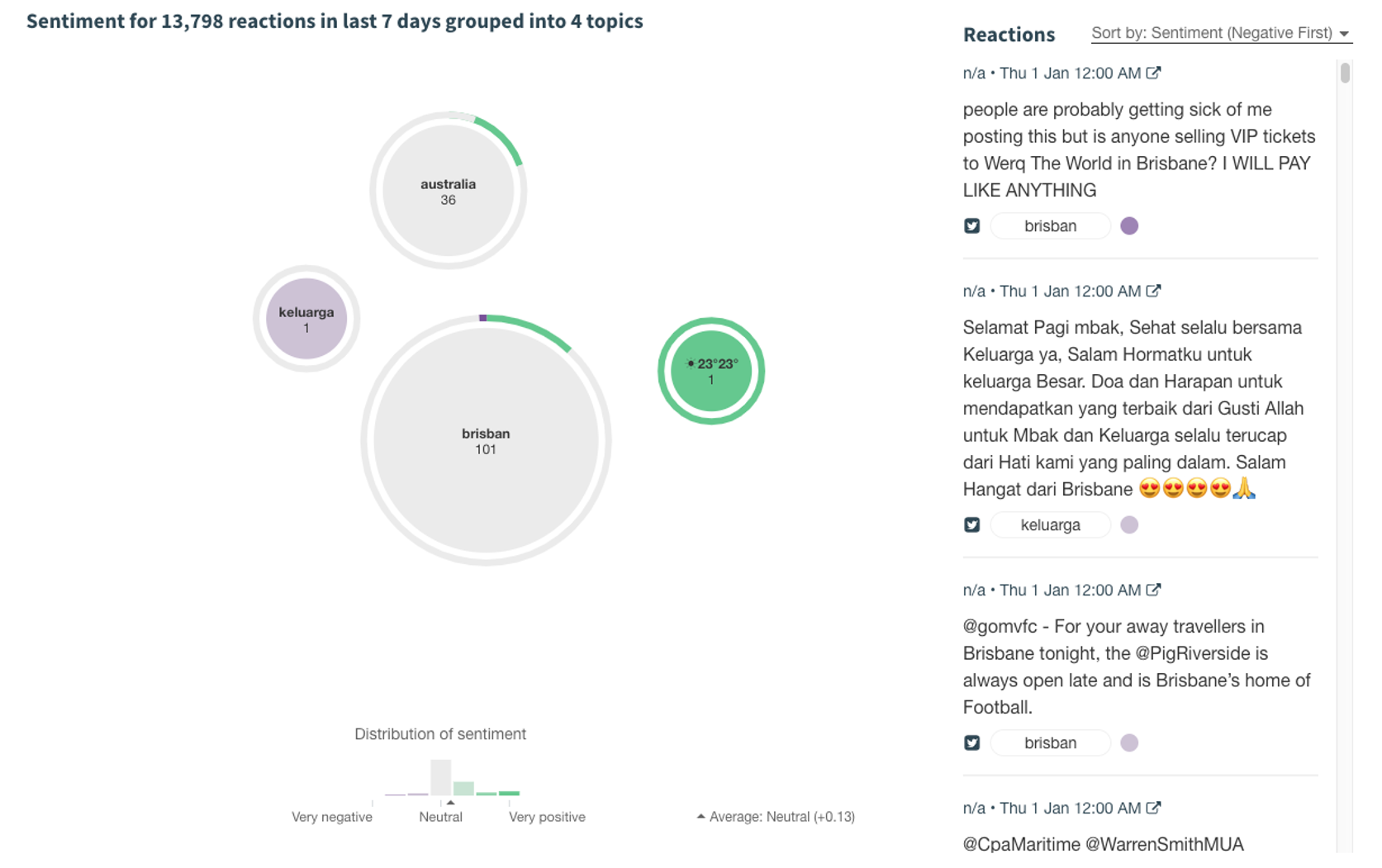
Citizen Voices in Cities Dashboard
The Citizen Voices in Cities (CiViC) dashboard uses big data mining algorithms to help local…
-

Exocentric Pedestrian Navigation for AR Head-Mounted Displays
We simulated a wearable AR pedestrian navigation application in virtual reality and explored the impact…
-
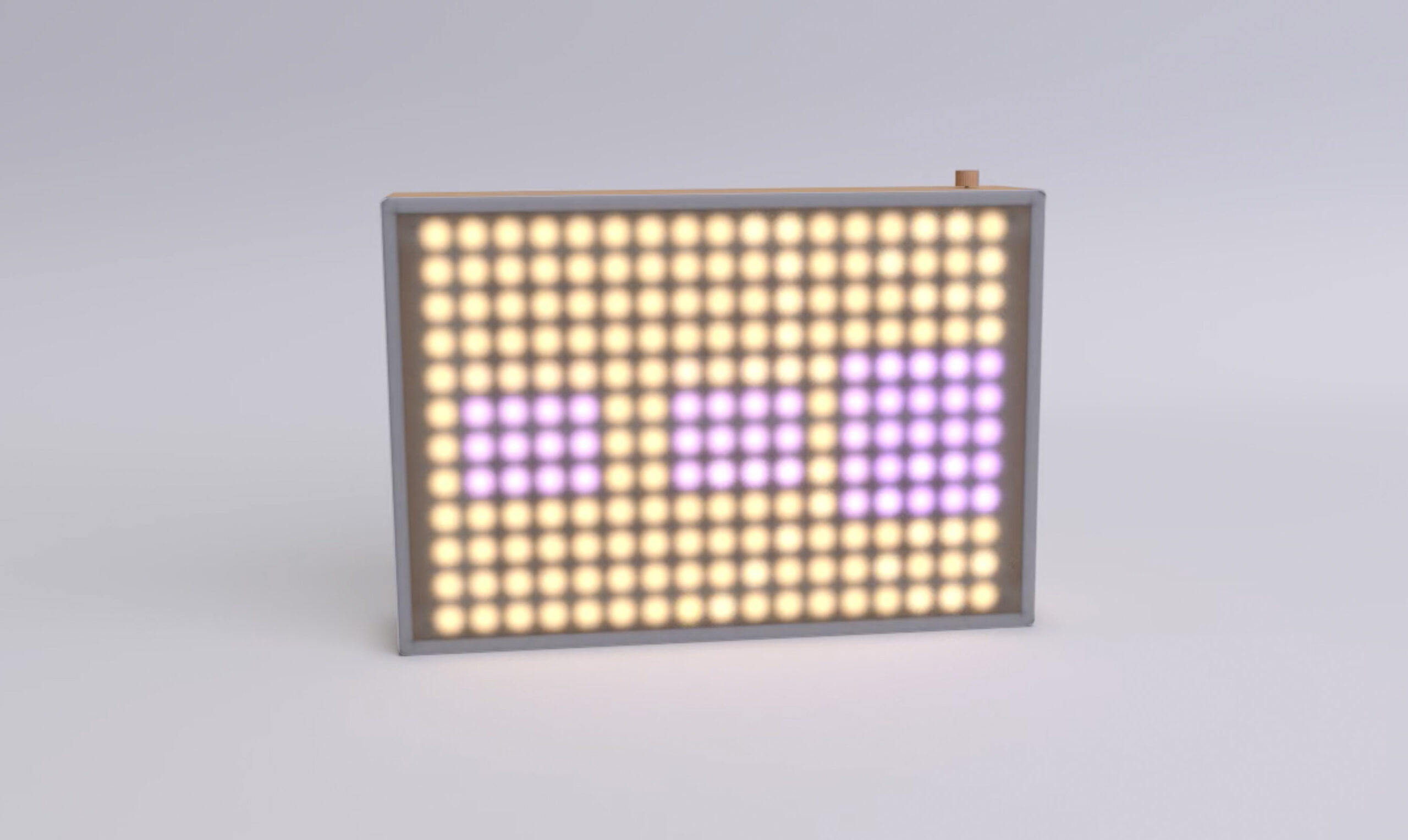
Designing Low-Resolution Lighting Displays
We developed the “Light Shifting Display” – a novel type of low-resolution lighting display that…
-

TetraBIN
TetraBIN explores how digital technologies can be used to motivate positive change in urban environments.