This project aims to understand how autonomous vehicles in urban environments need to interact with the people that they share those spaces with. Autonomous vehicles that are able to operate in shared spaces, such as campuses and pedestrian zones, promise to improve urban life. However, their uptake depends heavily on public acceptance as they operate in close proximity to people. The project investigates whether people are more likely to trust the technology and feel safe if they are able to understand how the system makes decisions and to directly influence its behaviour.
Australia’s world-leading position in mining robotics offers a unique first-mover advantage for Australia to lead the development of autonomous vehicle technology, a market estimated to increase to $348 billion globally within the next 10 years. Beyond the domain of driverless cars, autonomous vehicle technology enables new applications, such as transport pods, delivery droids and maintenance robots. The benefits of these kinds of vehicles, which can operate in shared spaces, such as pedestrian zones, include mobility for people with disabilities, delivery of goods in areas that are not accessible by cars and more efficient maintenance of urban infrastructure. The project contributes to Australia’s Smart Cities Plan, which outlines the impact of autonomous vehicles, and the Transport for NSW Future Transport 2056 Strategy, which prioritises “places for people”.
The project is funded through the Australian Research Council (ARC) Discovery Project (DP) scheme under the number DP220102019. It involves a collaboration between the University of Sydney’s Design Lab, Intelligent Transport Systems Group (part of the Australian Centre for Field Robotics) and the Urban Institute at the University of Sheffield.
Investigators:
Postdoctoral researcher:
PhD researchers:
- Tram Tran
- Yiyuan Wang
Project start: July 2022
Studies
-
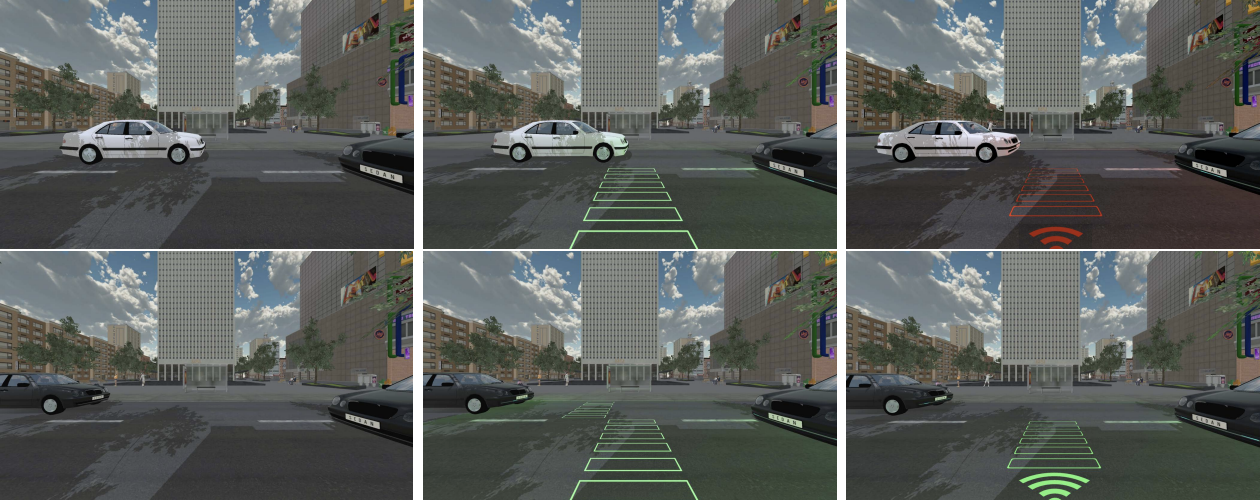
Interconnected External Interfaces in Autonomous Vehicles on Pedestrian Safety and Experience
Policymakers advocate for the use of external Human-Machine Interfaces (eHMIs) to allow autonomous vehicles (AVs)…
-
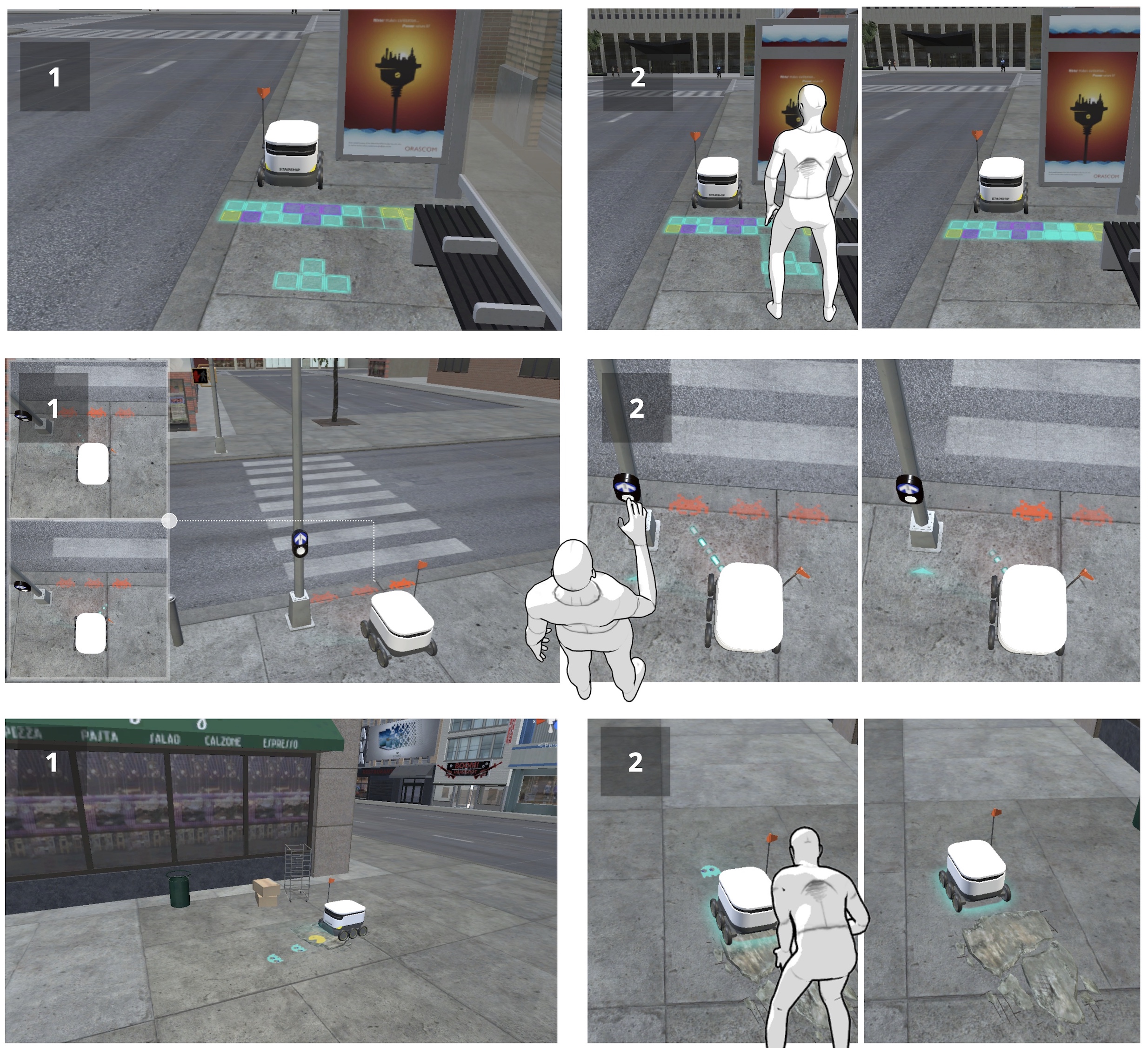
Playful Urban Robot Help-Seeking
Robots in urban environments will inevitably encounter situations beyond their capabilities (e.g., delivery robots unable…
-

Exploring Urban Robots Help-Seeking through Bodystroming
As intelligent agents transition from controlled to uncontrolled environments, they face challenges that sometimes exceed…
-
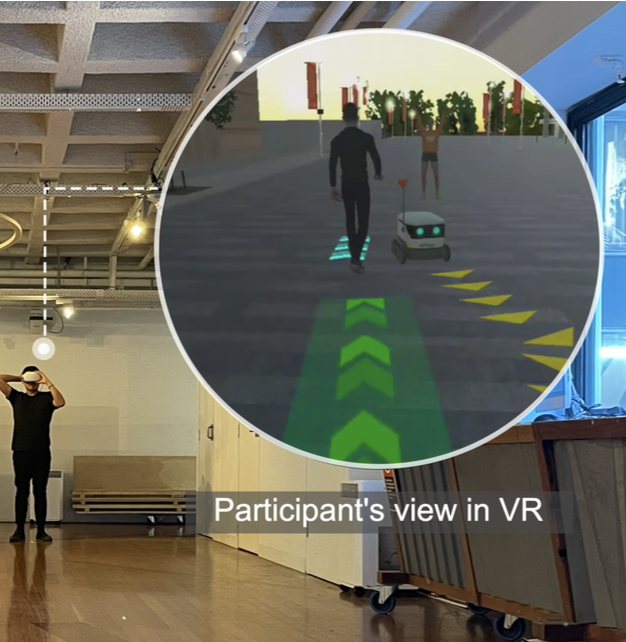
Improving Human-Robot Co-Navigation Through Pedestrian Prediction Visualisations
An augmented reality concept to enhance the understandability of robot operation.