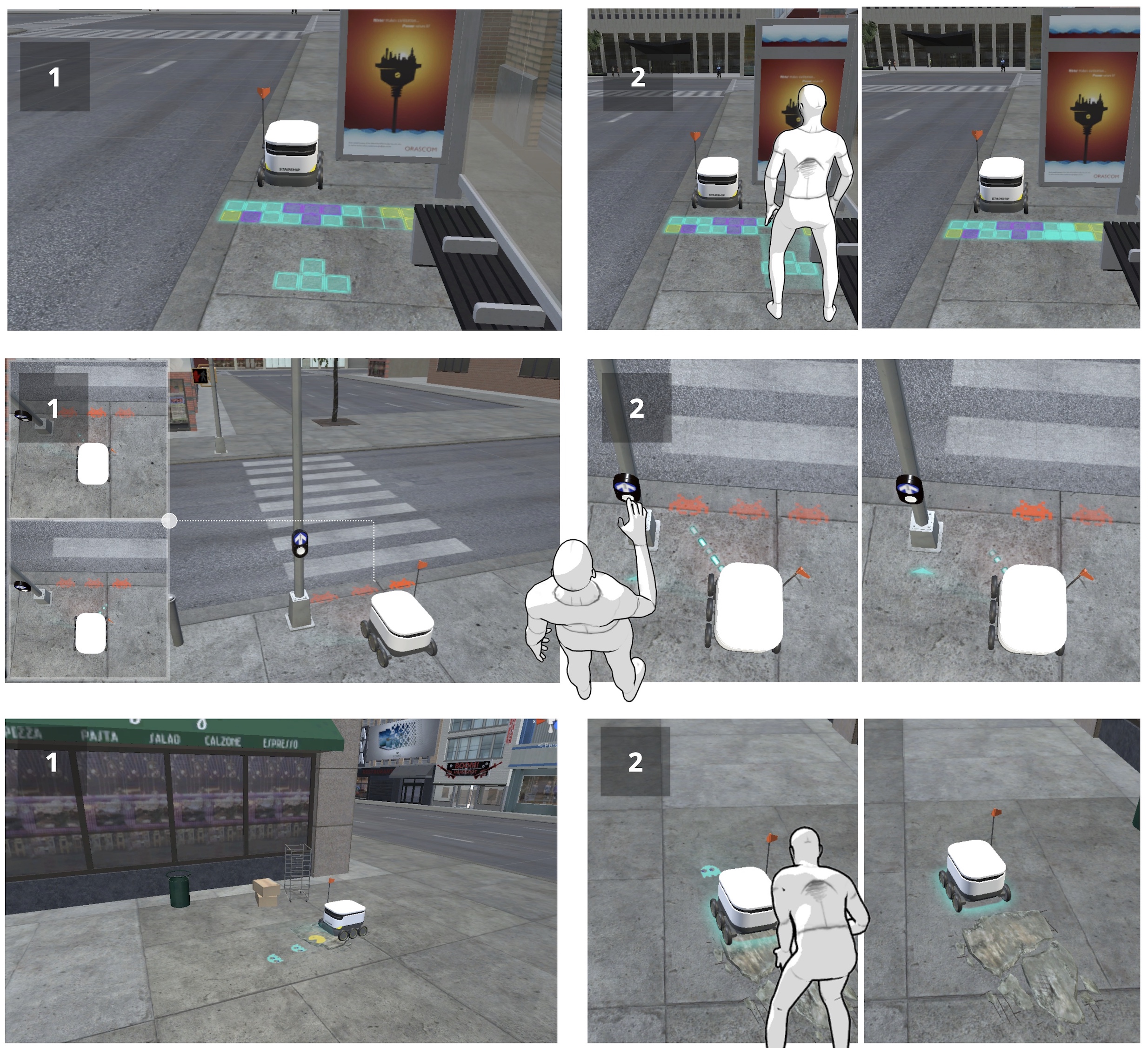
Robots in urban environments will inevitably encounter situations beyond their capabilities (e.g., delivery robots unable to press traffic light buttons), necessitating bystander assistance. These spontaneous collaborations possess challenges distinct from traditional human-robot collaboration, requiring design investigation and tailored interaction strategies.
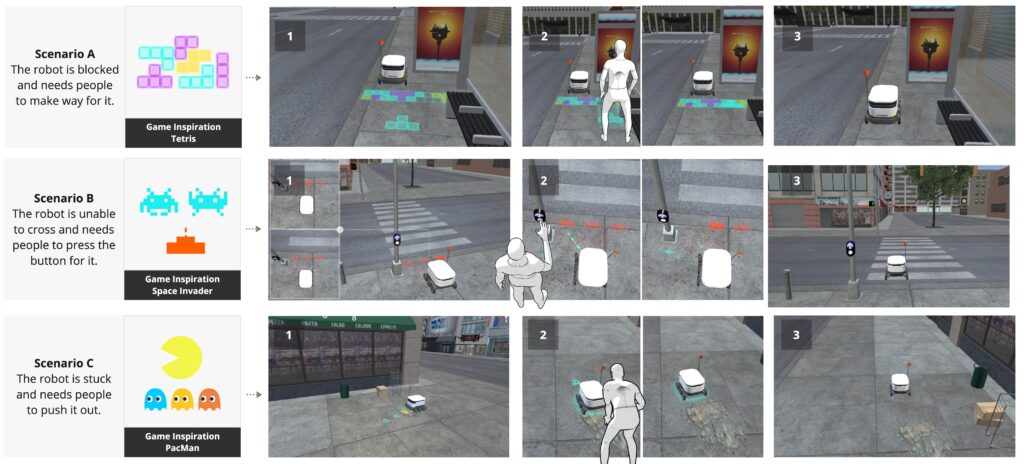
This study investigates playful help-seeking as a strategy to encourage such bystander assistance. We compared our designed playful help-seeking concepts against two existing robot help-seeking strategies: verbal speech and emotional expression. To assess these strategies and their impact on bystanders’ experience and attitudes towards urban robots, we conducted a virtual reality evaluation study with 24 participants. Playful help-seeking enhanced people’s willingness to help robots, a tendency more pronounced in scenarios requiring greater physical effort. Verbal help-seeking was perceived less polite, raising stronger discomfort assessments. Emotional expression help-seeking elicited empathy while leading to lower cognitive trust. The triangulation of quantitative and qualitative results highlights considerations for robot help-seeking from bystanders.
People
- Xinyan Yu
- Dr Marius Hoggenmueller
- Professor Martin Tomitsch
Publications
- Xinyan Yu, Marius Hoggenmüller, and Martin Tomitsch. 2024. Encouraging Bystander Assistance for Urban Robots: Introducing Playful Robot Help-Seeking as a Strategy. In Proceedings of the 2024 ACM Designing Interactive Systems Conference (DIS ’24). Association for Computing Machinery, New York, NY, USA, 2514–2529. https://doi.org/10.1145/3643834.3661505